Nederlands
Welkom bezoeker, u kunt Inloggen of Een account aanmaken

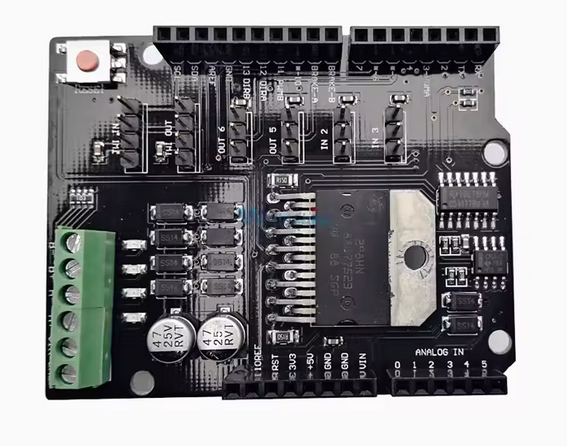
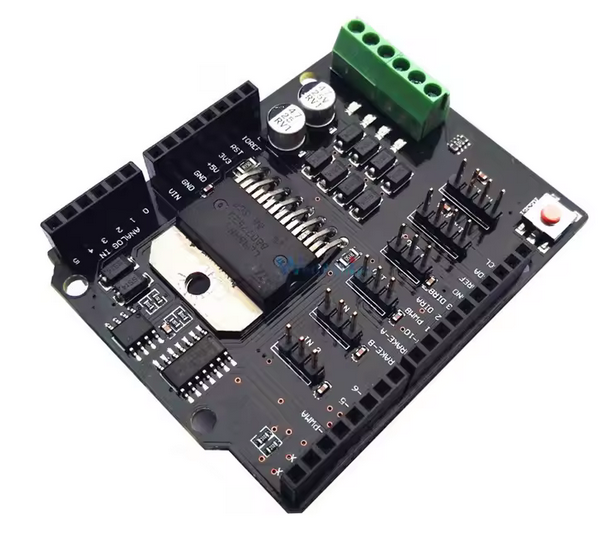
L298NH 2A Dubbel Kanaals DC Stepper Motor Driver Shield
- Artikelnummer:
- AR0407
- Beschikbaarheid:
- Op voorraad (5)
- Levertijd:
- Dit product word op werkdagen binnen 24 uur verzonden
€9,95
Incl. btw
L298NH 2A Dubbel Kanaals DC Stepper Motor Driver Shield
L298NH 2A Dubbel Kanaals DC Stepper Motor Driver Shield
De Motor Shield is gebaseerd op de L298NH, een dubbele full-bridge driver ontworpen voor het aansturen van inductieve belastingen zoals relais, solenoïden, DC- en stappenmotoren.Hiermee kunt u twee DC-motoren aansturen met uw Arduino-bord, waarbij u de snelheid en richting van elk motor onafhankelijk kunt regelen.U kunt onder andere ook de motorstroomabsorptie van elke motor meten.
•In de sectie Aan de slag vindt u alle informatie die u nodig heeft om uw bord te configureren, de software voor Arduino (IDE) te gebruiken en te beginnen met knutselen aan codering en elektronica.
Technische specificaties
Bedrijfsspanning 5V tot 12V
Motorcontroller L298HN, stuurt 2 DC-motoren of 1 stappenmotor aan
Max. stroom 2A per kanaal of maximaal 4A (met externe voeding)
Stroomdetectie 1,65 V/A
Vrijloop-, stop- en remfunctie
Kracht
Het Motor Shield moet alleen worden gevoed door een externe voeding.Omdat de L298HN IC die op het schild is gemonteerd, twee afzonderlijke stroomaansluitingen heeft, één voor de logica en één voor de motortoevoeraandrijving.De vereiste motorstroom overschrijdt vaak de maximale USB-stroomsterkte.
Externe (niet-USB) voeding kan afkomstig zijn van een AC-naar-DC-adapter (wandwart) of van een batterij.De adapter kan worden aangesloten door een 2.1mm center-positieve stekker in de Arduino board power jack waarop het motor shield is gemonteerd, of door de draden die de voeding naar de Vin en GND schroefklemmen leiden aan te sluiten, waarbij je de polariteit respecteert.
Om mogelijke schade aan het Arduino-bord waarop het schild is gemonteerd te voorkomen, raden wij aan een externe voeding te gebruiken die een spanning levert tussen 7 en 12V.Als uw motor meer dan 9V nodig heeft, raden wij u aan de stroomkabels van het schild en het Arduino-bord waarop het schild is gemonteerd te scheiden.Dit is mogelijk door de "Vin Connect"-jumper aan de achterkant van het schild door te snijden.De absolute limiet voor de Vin bij de schroefklemmen is 18V.
Het schild kan 2 ampère per kanaal leveren, voor een totaal van maximaal 4 ampère.
Invoer en uitvoer
Dit schild heeft twee afzonderlijke kanalen, A en B genoemd, die elk 4 van de Arduino-pinnen gebruiken om de motor aan te sturen of te detecteren.In totaal worden er 8 pinnen gebruikt op dit schild.U kunt elk kanaal afzonderlijk gebruiken om twee DC-motoren aan te drijven of ze te combineren om één bipolaire stappenmotor aan te drijven.De pinnen van het schild, verdeeld per kanaal, worden weergegeven in de onderstaande tabel:
Functie pinnen per Ch.A pinnen per Ch.B
Richting D12 D13
PWM D3 D11
Rem D9 D8
Stroomdetectie A0 A1
Als je de rem- en stroomdetectie niet nodig hebt en je ook meer pinnen nodig hebt voor je toepassing, kun je deze functies uitschakelen door de betreffende jumpers aan de achterkant van het schild door te knippen.
Motoraansluiting
Geborstelde gelijkstroommotor.U kunt twee Brushed DC-motoren aansturen door de twee draden van elk motor aan te sluiten op de (+) en (-) schroefklemmen voor elk kanaal A en B.Op deze manier kunt u de richting regelen door de DIR A- en DIR B-pinnen HOOG of LAAG in te stellen. U kunt de snelheid regelen door de duty-cycle-waarden van PWM A en PWM B te variëren.De rem A- en rem B-pinnen zullen, indien HOOG ingesteld, de DC-motoren effectief remmen in plaats van ze te laten vertragen door de stroom uit te schakelen.U kunt de stroom die door de DC-motor loopt meten door de SNS0- en SNS1-pinnen af te lezen.Op elk kanaal zal een spanning zijn die evenredig is met de gemeten stroom, die kan worden gelezen als een normale analoge ingang, via de functie analogRead() op de analoge ingang A0 en A1.Voor uw gemak is hij gekalibreerd op 3,3 V wanneer het kanaal de maximaal mogelijke stroom levert, dat wil zeggen 2 A.